SEMINAR

人手不足解消
6軸力覚センサをロボットに実装することで、繊細な作業の自動化も可能に。バリ取り・ピッキングの実例をご紹介します。
セミナーや紹介商品に関する
お問い合わせはこちら
セミナー内容に関連する資料はこちら
「資料ダウンロードボタン」を押すと新東工業コーポレートサイトのログインページが開きます。(※初回のダウンロード時のみ)
POINT
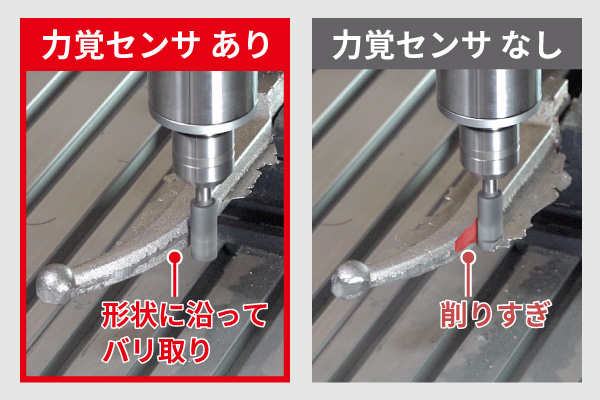
通常、ロボットによるバリ取り作業は、削りすぎや削り残しが発生します。
力覚センサを実装すると、設定した力で押し当てるため、バリの削りすぎや削り残しが発生しづらくなります。個体差や固定のズレを吸収し、確実な仕上げを行います。
ピッキング作業では通常、ビジョンセンサを用いますが、ハンドを意図せずぶつけて損傷させたり、ネジ山を傷つけたりして、不良を生み出す可能性もあります。
力覚センサと組み合わせると、ハンドの接触を検知できるように、ねじ山を傷つけないピッキングを実現できます。

セミナーや紹介商品に関する
お問い合わせはこちら
セミナー内容に関連する資料はこちら
「資料ダウンロードボタン」を押すと新東工業コーポレートサイトのログインページが開きます。(※初回のダウンロード時のみ)
PICK UP

6軸力覚センサ ZYXer

力覚センサ導入で人手不足の解消ロボット自動化促進展