













































お知らせ
力制御を同時に行う 「オフラインティーチングソフトZYXerPath」を販売開始
力制御を同時に行う「オフラインティーチングソフトZYXerPath」を販売開始
ロボットのティーチング作業を劇的に改善
新東工業株式会社(本社:名古屋市、社長 永井 淳)は、6軸力覚センサ「ZYXer(ジクサー)」と連動し、力制御を可能にした「オフラインティーチングソフト ZYXerPath(ジクサーパス)」を3月9日に販売開始いたします。

通常、ロボットに動きを設定するティーチング作業は、ティーチングペンダントと呼ばれるコントローラを操作し、目視で製品との緩衝を確認しながら微妙な動きを調整します。そのため、ティーチング作業には教示者の熟練度によるティーチング回数や時間の差が生じていました。また、ロボットが設置されている安全柵の中に入り、ティーチング作業を行う場合もあり、作業者の安全面においても課題があります。
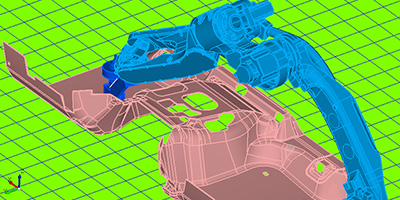
「オフラインティーチング」は通常のロボットティーチング作業とは異なり、3D CADのソフトを利用し、ソフトウェア上でロボットの軌道を作成して動作を覚えさせるティーチング方法です。3D CADのモデリングデータがある場合は、ティーチング作業の時間削減が期待できます。
しかし、一般的なオフラインティーチングソフトは、3Dデータ上の作業対象と現物の作業対象との形状差には対応できないため、現場での微調整が必要となるケースもあります。また、設置時の微妙なズレを把握して反応することはできないため、シミュレーション通りの結果が得られず、生産現場ではエラーや加工不良が発生するという課題がありました。
当社はこのような生産現場の課題に応えるため、グループ会社である新東スマートエンジニアリングと連携し、6軸力覚センサ「ZYXer」を活用したオフラインティーチングソフト ZYXerPathを開発しました。
当社が独自開発した2系統へ出力する「ダブル出力モデル」の力覚センサを使用し、力データの出力の1つはロボット制御に、もう1つは現物の加工対象の輪郭に沿った制御に活用することで、個体差や設置時の微妙なズレを考慮して、高精度なティーチング作業を実現します。
このZYXerPathを活用することで、微調整のために現場に行く必要がなくなります。また、複雑な動きであっても3Dデータ上でロボットへのティーチングを完結することができ、場所に制限されることが無い為、急速に進むものづくり現場のデジタル化に対応しています。
ZYXerPathは、ロボットメーカの各種ソフトにも対応しています。また、当社は3月9日より東京ビックサイトにて開催予定の「2022国際ロボット展」にてZYXerPathを展示する予定です。
当社は今後も、ものづくり現場の自動化や省力化に向けて、ロボット関連事業のさらなる拡大を図ってまいります。