




プログラムを容易に設定
高精度な加工をサポートします。
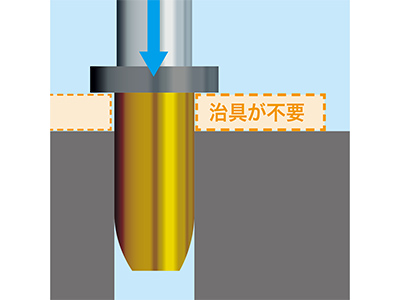
装置たわみ量を考慮した自動位置補正変速機能を標準搭載。
中間停止の圧入が可能となりました。
以下のような動作を容易にプログラムできます。
1. 位置停止
- 指定速度で移動
- 目標位置で指定時間保持
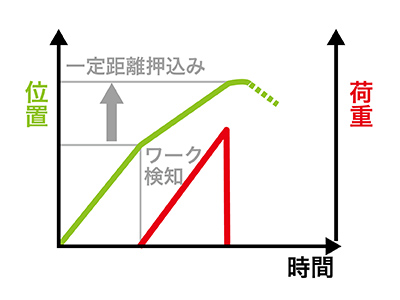
2. 一定距離停止
- 指定速度で指定距離移動
- 到達後に指定時間保持
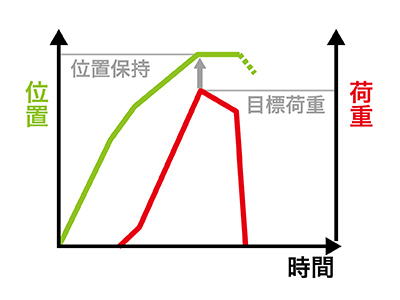
3. 荷重停止・位置保持
- 指定速度で移動
- 目標荷重の位置で指定時間保持
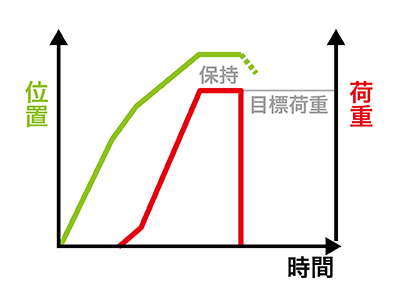
4. 荷重停止&荷重保持
- 指定速度で移動
- 目標荷重で指定時間保持
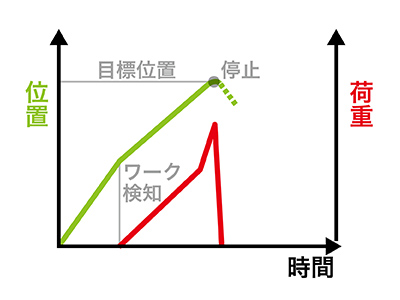
5. 変曲点停止
- 指定速度で加圧
- 変曲点を検知したら指定時間保持

簡単設定で自由な動作を実現します。
日本語のコマンドを並び替えることで自由な運転プログラムを作成できます。
専門知識がなくても多彩な動作を作り込むことができます。
装置タッチパネル、ティーチングボックス、パソコンからから目標位置などを入力可能です。

外部機器の信号を制御に使用可能
位置や荷重の設定の他、『外部機器の信号を検出するまで圧入する』といった連携動作も可能です。
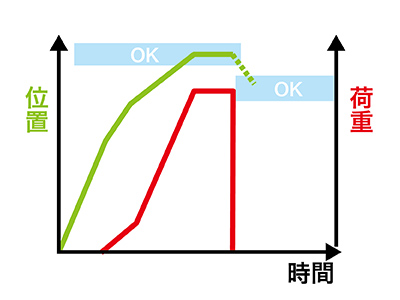
品質判定
多彩なOK、NG判定が可能
運転中や完了時点での位置・荷重データにより、品質判定を自動で行うことができます。
判定基準、判定方法を組み合わせることで、より確かな品質判定が可能です。
ピーク、エリア、ボトム、位置ポイント、荷重ポイント(各4個)、ワーク検出、変曲点、圧入端(各1個)の最大23個のOK、NG判定が可能です。
1. 停止点判定
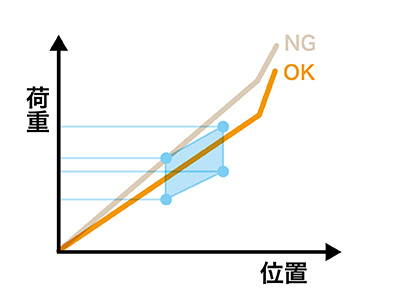
2. エリア判定(最大4領域)
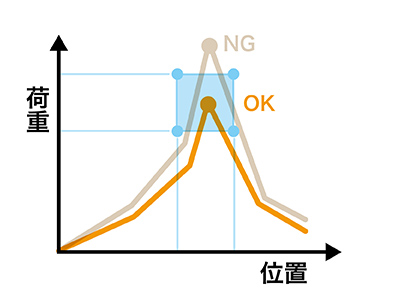
3. ピーク判定(最大4領域)
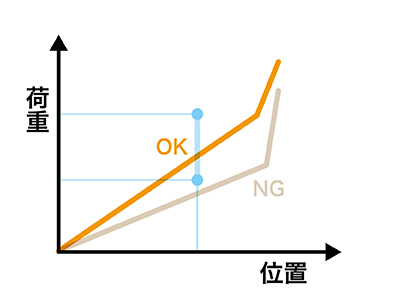
4. ポイント判定(最大4ヶ所)
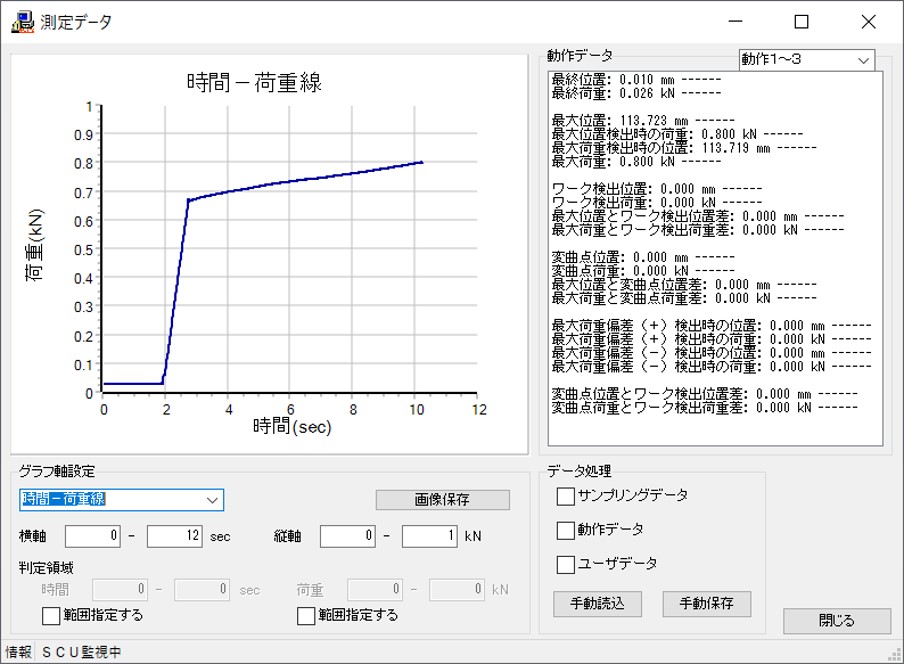
運転の可視化
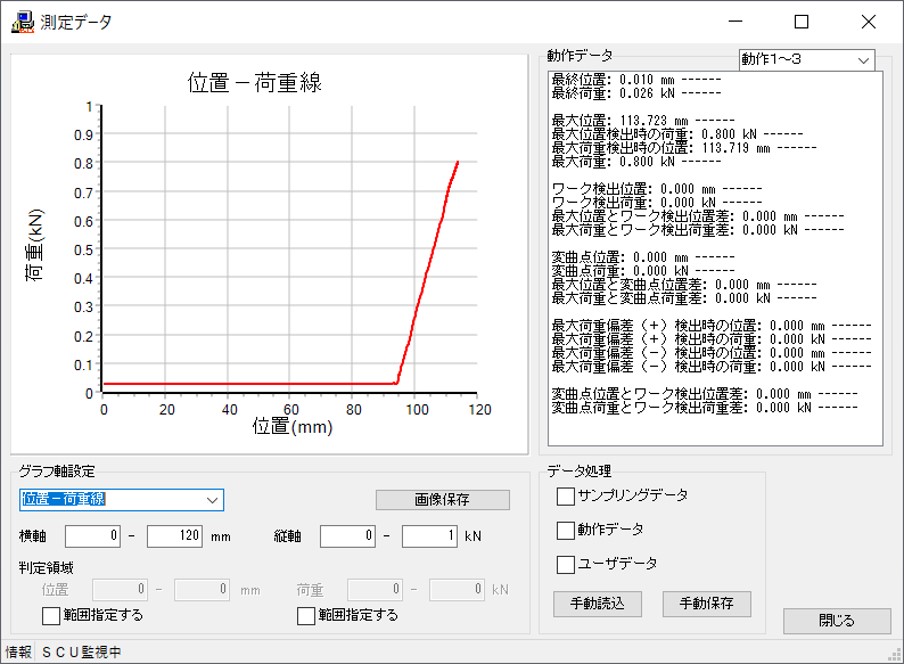
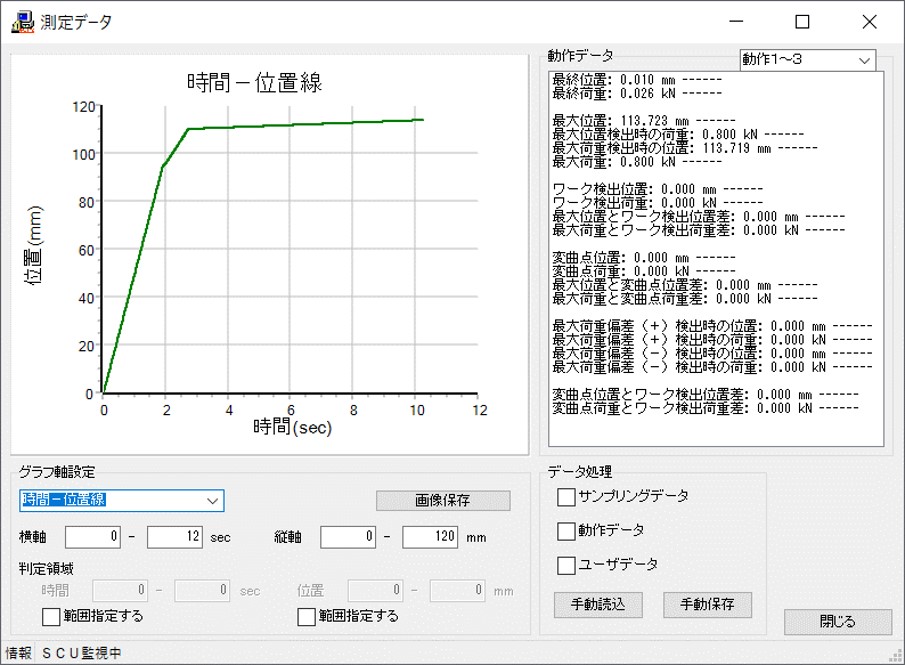
運転結果は、PC画面にて3種類のグラフ波形表示が可能です。
位置―荷重グラフ
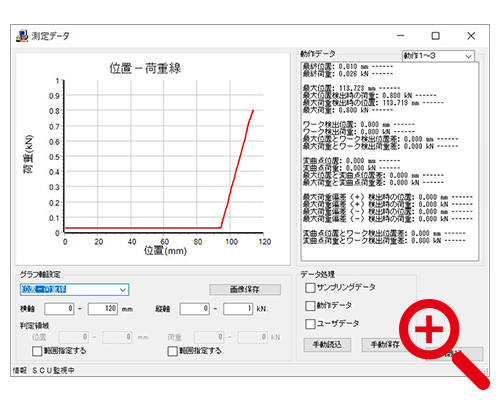
時間―位置グラフ
時間―荷重グラフ
トレーサビリティ
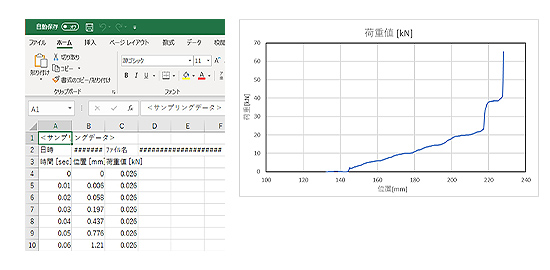
CSVデータ出力
運転データをCSVデータに出力し、グラフ化や分析が容易です。
オプション
ティーチングボックス
動作プログラム設定や手動操作ができるため、試運転調整などが容易になります。動作状況の確認も可能です。

圧入データ管理ソフト
PC操作で動作プログラムの設定やバックアップが容易です。動作データを収集し、運転状況をグラフ化して分析できます。

外形図
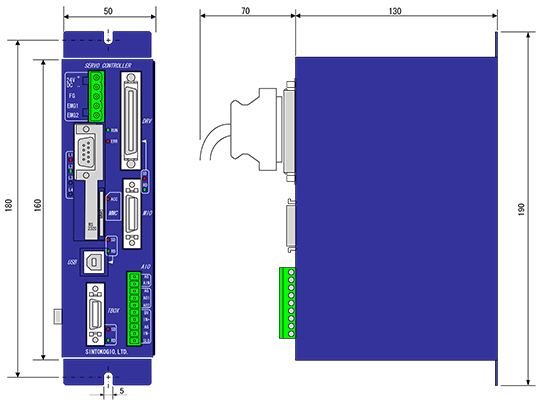
※通信基盤によって本体外寸が変更になることがありますのでご相談下さい
検証のテストルームを
ご用意しております



- テスト内容
-
- 貼り合わせ
- 圧入・カシメ
- 成形
- 分散
- 圧着
- 切断
- テスト装備
-
- 圧入プレス
加圧力:10kN~200kN
ワークサイズ:500×500mm
- 精密プレス装置①
加圧力:10kN~100kN
ワークサイズ:□300mm
加熱温度:~300℃ - 精密プレス装置②
加圧力:10kN~1000kN
ワークサイズ:□300mm
加熱温度:~400℃
- 真空ロールプレス
加圧力:~15kN
対応ワーク幅:50~150mm - 卓上プレス
加圧力:1kN~10kN
ワークサイズ:□100mm
加熱温度:~200℃
- 卓上分散・分散
粘度:100~25万Pa・s
対応粒子径:数µm以上
処理量:0.3L~8L/min
- 圧入プレス
- 開館時間
- 9:00~17:00
- 休館日
- 土・日・祝祭日
- 住所
- 〒441-1304
愛知県新城市大宮字南貝津3番地35 プロセスセンター(新東工業 新城事業所内)Googlemap
- アクセス
- 新東名「新城IC」よりお車で5分
JR飯田線「新城駅」よりタクシーで10分
特機事業部 営業グループ