













































チカラの“見える化”が、
“できる”に変える。
6軸力覚センサは、3方向(X、Y、Z)の荷重(F)とそれぞれの軸周りの3方向のモーメント(M)を同時に検出するセンサです。
荷重とモーメント=チカラを高精度に数値化し把握することで、今まで人に頼らざるを得ない、と考えられていた作業や“こんなこと ができたら” と望まれていることが実現できます。
今、ZYXer〈ジクサー〉は、さまざまな分野で活躍の場を拡げています。
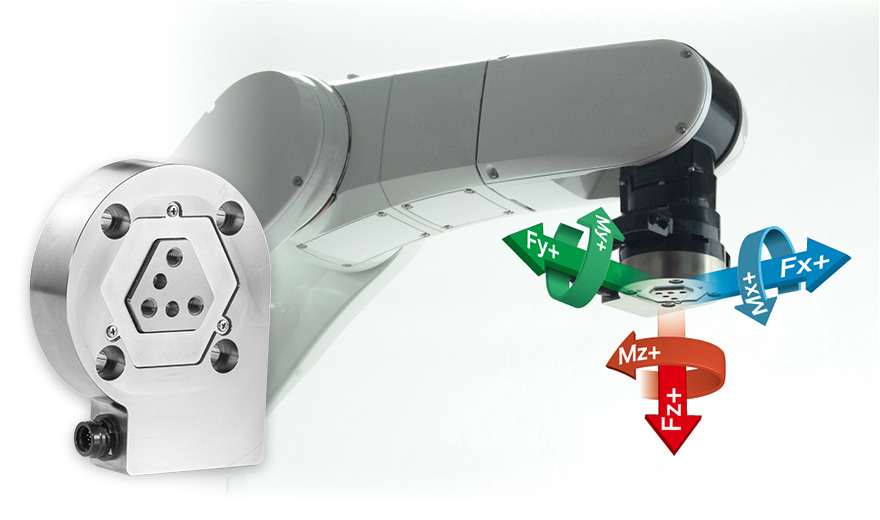
6軸力覚センサ の特長
の特長
- 業界最速レベルの通信速度 0.83msec.
- 業界最高水準の高精度 分解能 1/4000(定格容量比)
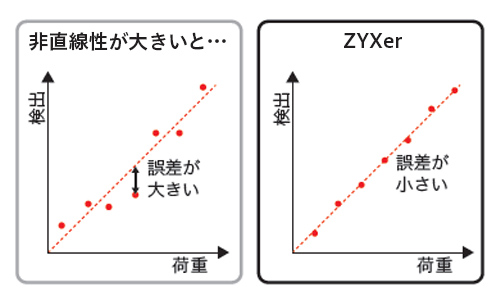
- 信頼性の高い検出データ 非直線性 ±2.0%
- 『IP67対応』※1で高い防水・防塵性
※1:オプション
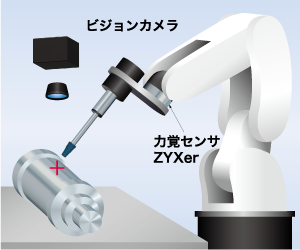
熟練者の精密作業を
力覚センサが再現
6軸力覚センサZYXer(ジクサー)は3軸(X,Y,Z)の荷重(F)と各軸周りのモーメント(M)を同時に検出するセンサです。
ロボットに取り付けることで、人の手作業のような制御を実現します。
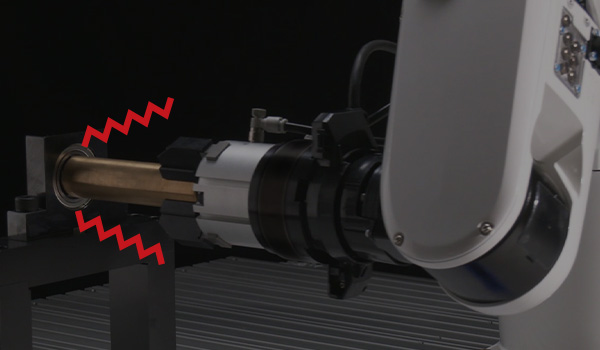
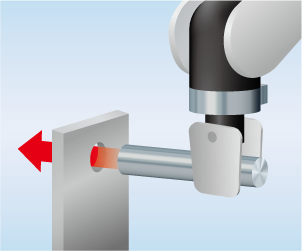
力覚センサが無いはめ合わせ
ロボットの繰り返し精度では公差以上の位置ズレで傷つき・稼働停止の可能性があります。
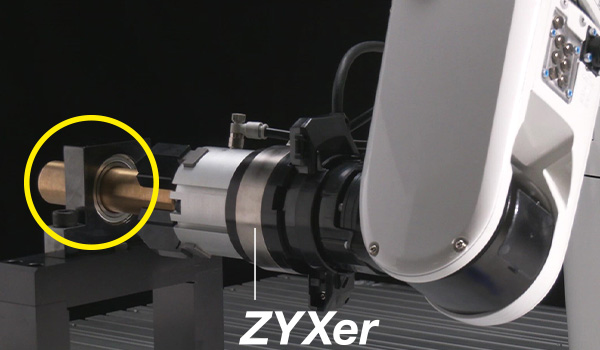
力覚センサを実装すると…
リアルタイムの力検知により、位置を自動補正して確実に挿入可能です。
各種ダウンロードはこちら
6軸力覚センサを搭載するメリット
熟練作業を自動化し、省人化・人手不足への
対応と生産性向上を実現
熟練作業者の力加減を数値で見える化し、
後継者育成をサポート

かかっている力を数値化し、
デジタル管理による品質向上

6軸の検出荷重を記録し、
トレーサビリティへ貢献

接触時に即停止することで破損を防止
生産性・歩留まりの向上を実現

遠隔操作で作業者の安全を確保

パワーアシストで楽々操作、
オペレータの負担軽減

お客さまの設備と
商品の付加価値向上に貢献
6軸力覚センサ をロボットに組み込むことで、
をロボットに組み込むことで、
様々なことが期待できます。
- 遊星歯車に対しても、その干渉を感じ取り、力や位置をコントロール。取付寸法の僅かな誤差までも吸収します。
- 高精度、高トルク、高速通信の特長を活かして、H7嵌合やバリ取りを行います。
- ビジョンセンサだけでは破損防止が難しいピッキング作業を、ZYXerを組み合わせることで解決できます。
- 稼働中、イレギュラーな動作によるロボットハンドや持っている製品の破損防止が可能です。
6軸力覚センサの用途例
USE
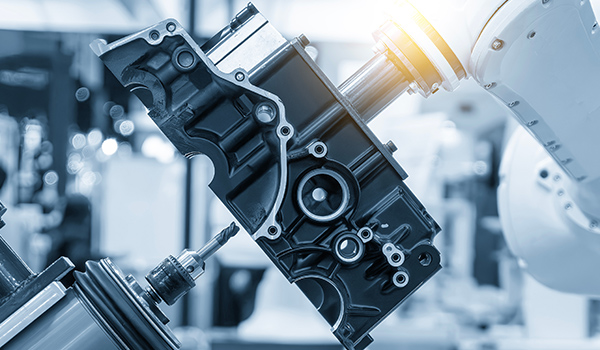
ロボットだけでは困難な自動化も実現
ロボットに力の感覚を持たせ、製品や治具等との接触による反力に応じて、ロボットのアームをコントロール。
これまで自動化が困難であった不規則な表面への倣い作業でも、力覚センサZYXer を用いることで、ロボットによる自動化を実現します。
軟体物の加工・検査を自動化
- 微細な力加減により、低反発な不定形状にも丁寧に追随。
- 反発力の検査、記録も可能。
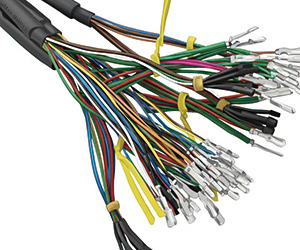
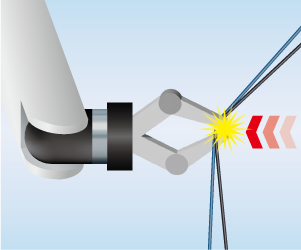
ワイヤ類の取り扱い
ビジョンカメラとの連携による更なる高精度化
- ワーク認識による位置把握と繊細な力制御による組立・加工。
- 力覚センサ+ビジョンカメラのマルチモーダルデータを用いたAI活用への展開も可能。
精密組立・加工
精密組立・嵌合
素早い応答で位置を自動補正してH7/f7嵌合を実現。±0.02mmのズレも補正。
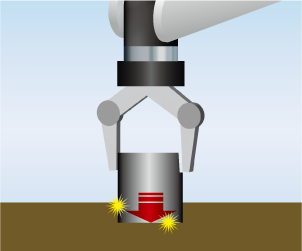
挿入·差込
挿入物の接触を検知し、自動停止。
面合せ・軸合せ
高精度なティーチング、ワークの位置合せが不要。
適正な締め付けトルク管理が可能。
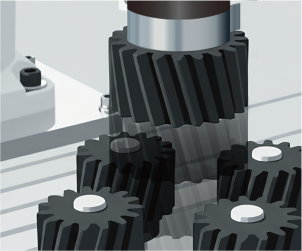
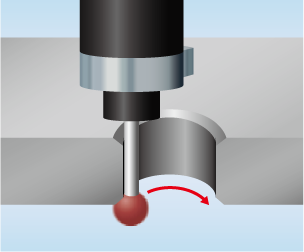
ギヤ位相合せ
ギアにかかる小さな力データを検出。速やかに自動位置補正を行い、精度の高い位相合せを実現。
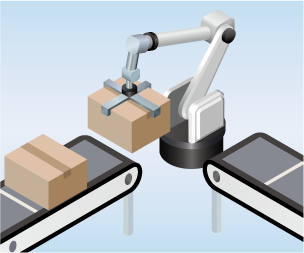
搬送中の重量測定
搬送工程にてリアルタイムに重量を
測定。
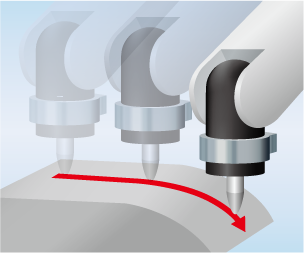
曲面ならい塗布
接着剤など曲面への追従性を活かした塗布。
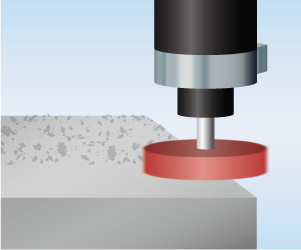
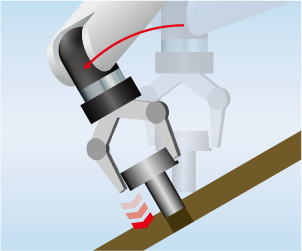
研削·研磨
研磨表面の凹凸にも倣って、一定の力で研磨。
バリ取り・R面加工
荷重変化からバリ残りを検知して確実な仕上げ。
製品へのダメージを未然に防止します。
押し付け圧検知
接触検知
引っ張り力検知
過負荷検知
各種装置に組み込むことで、新しい価値を創造
力の見える化により、各種製造装置に新しい機能、価値を創造できます。
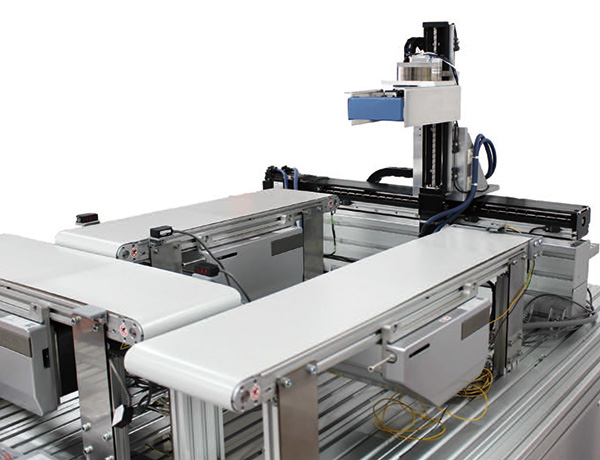
“運び”ながら“量る”
三次元搬送中に高速で高精度な重量測定
- 工程を削減し、サイクルタイム短縮。
- ウエイトチェッカーをなくし、省スペース化に対応。
- 独自ソフトウェアで分析。
I/Oのみで、装置との複雑なやり取りは不要。
重量測定結果画面
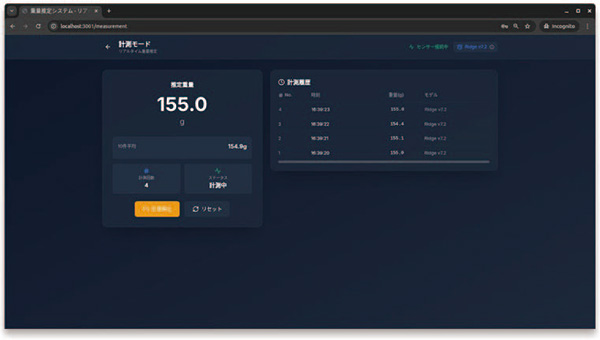
ダイナミック重量測定® by ZYXer®
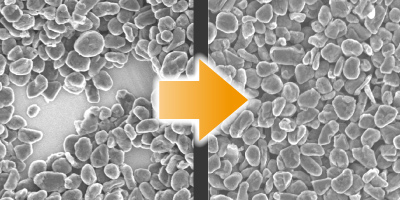
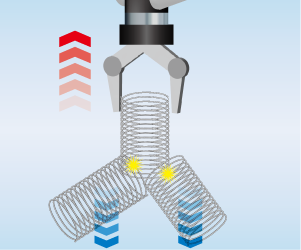
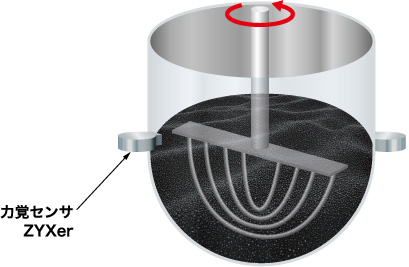
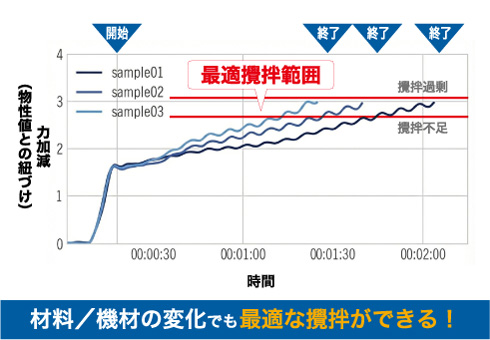
“うまくできた”時の力を見える化
攪拌時の品質指標を力データにてリアルタイム管理
- 最適攪拌の分析に向けた力データの収集。
- 異常時の注意喚起。
- 攪拌時の力データの記録によるトレーサビリティ対応。
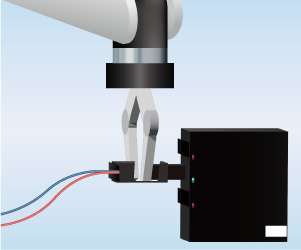
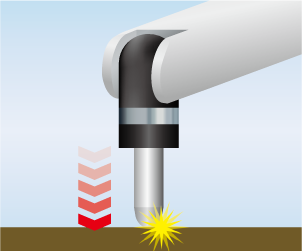
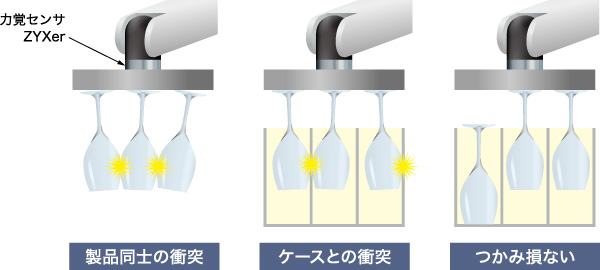
接触したら、即停止
接触検知で搬送時に異常検出
ガラス、シリコン、セラミックス製品の破損を防止
移載、運搬中の製品の接触を検知し、
不良原因の後工程への流出防止。
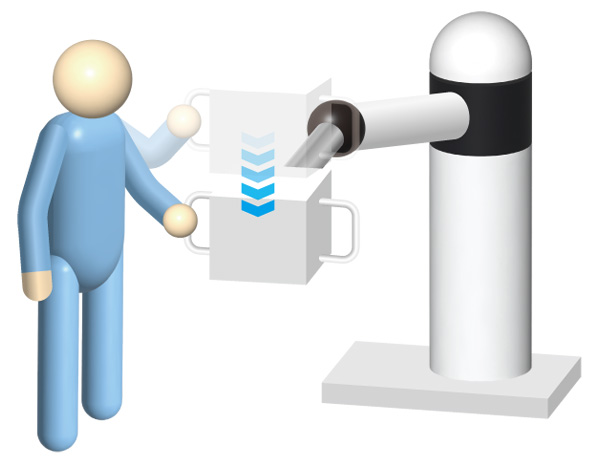
小さな力で重い機器を操作でき、疲労軽減
- 力の強さや方向を検出することで小さな力で機器操作が可能。
- 重心検知やバランス維持、水平異常にも対応。
ZYXer®パワーアシスト技術を搭載した場合
6軸力覚センサ ZYXer®
商品情報
LINEUP
6軸力覚センサ ZYXer®
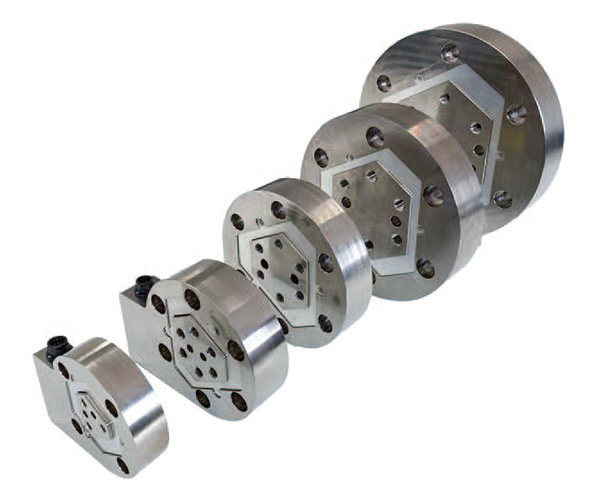
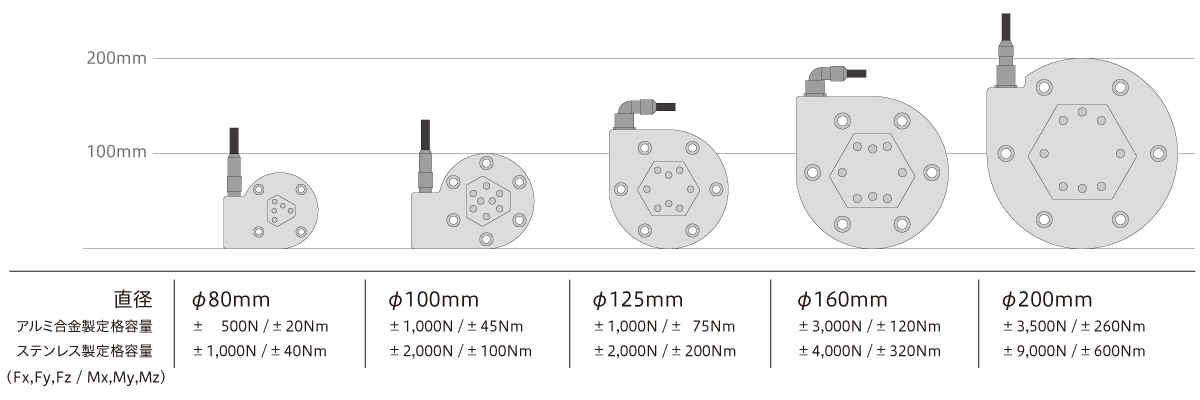
標準品ラインアップ
各種用途、使用条件などに応じて、最適なセンサをご提供できるよう
11種類を標準品としてラインアップしています。
- 定格容量
Fx Fy Fz:±500N~±9,000N
Mx My Mz:±20Nm~±600Nm - 本体材質:
アルミ合金
ステンレス


仕様
| 型番 | サイズ | 取付寸法 | 定格容量 | 許容過負荷 | 質量 | 本体材質 | ダウンロード | ||
|---|---|---|---|---|---|---|---|---|---|
| ツール側 | ロボット側 | Fx Fy Fz | Mx My Mz | ||||||
| ZYX080A501Z | Φ80 x H25 | 3xM6 P.C.D.21 |
4xM6 P.C.D.63 |
± 500N | ± 20Nm | ± 500% R.C.※1 | 約320g | アルミ合金 | 2DCAD/3DCAD/仕様書 |
| ZYX080A501 | Φ80 x H22 | 3xM6 P.C.D.21 |
4xM6 P.C.D.63 |
± 500N | ± 20Nm | ± 200% R.C. | 約280g | アルミ合金 | 2DCAD/3DCAD/仕様書 |
| ZYX080S102 | 3xM8 P.C.D.20 |
4xM6 P.C.D.63 |
± 1,000N | ± 40Nm | ± 500% R.C. | 約650g | ステンレス | 2DCAD/3DCAD/仕様書 | |
| ZYX100A102 | Φ100 x H30 | 6xM8 P.C.D.32 |
6xM8 P.C.D.80 |
± 1,000N | ± 45Nm | 約500g | アルミ合金 | 2DCAD/3DCAD/仕様書 | |
| ZYX100S202 | ± 2,000N | ± 100Nm | 約1.4kg | ステンレス | 2DCAD/3DCAD/仕様書 | ||||
| ZYX125A102 | Φ125 x H30 | 6xM8 P.C.D.46 |
6xM8 P.C.D.100 |
± 1,000N | ± 75Nm | 約850g | アルミ合金 | 2DCAD/3DCAD/仕様書 | |
| ZYX125S202 | ± 2,000N | ± 200Nm | 約2.4kg | ステンレス | 2DCAD/3DCAD/仕様書 | ||||
| ZYX160A302 | Φ160 x H35 | 6xM10 P.C.D.63 |
6xM10 P.C.D.125 |
± 3,000N | ± 120Nm | 約1.6kg | アルミ合金 | 2DCAD/3DCAD/仕様書 | |
| ZYX160S402 | ± 4,000N | ± 320Nm | 約4.5kg | ステンレス | 2DCAD/3DCAD/仕様書 | ||||
| ZYX200A352 | Φ200 x H40 | 6xM10 P.C.D.80 |
6xM10 P.C.D.160 |
± 3,500N | ± 260Nm | 約2.6kg | アルミ合金 | 2DCAD/3DCAD/仕様書 | |
| ZYX200S902 | ± 9,000N | ± 600Nm | 約7.3kg | ステンレス | 2DCAD/3DCAD/仕様書 | ||||
※1 R.C.=定格容量(Rated Capacity)
2DCAD/3DCAD/仕様書
ダウンロード
- ZYX080A501Z
- 2DCAD/3DCAD/仕様書
- ZYX080A501
- 2DCAD/3DCAD/仕様書
- ZYX080S102
- 2DCAD/3DCAD/仕様書
- ZYX100A102
- 2DCAD/3DCAD/仕様書
- ZYX100S202
- 2DCAD/3DCAD/仕様書
- ZYX125A102
- 2DCAD/3DCAD/仕様書
- ZYX125S202
- 2DCAD/3DCAD/仕様書
- ZYX160A302
- 2DCAD/3DCAD/仕様書
- ZYX160S402
- 2DCAD/3DCAD/仕様書
- ZYX200A352
- 2DCAD/3DCAD/仕様書
- ZYX200S902
- 2DCAD/3DCAD/仕様書
- 非直線性※2※3
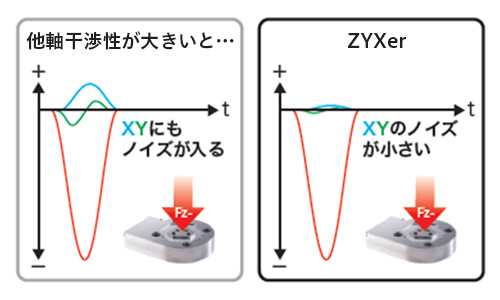
± 2.0% R.O. - 他軸干渉性※4
± 3.0% R.O. - ヒステリシス
± 0.2% R.O. - 温度特性
± 0.3% R.O./℃ - 使用温度範囲
0~50℃ - 分解能
± 1/4000 (DC) - 電源
DC5V+5% - 変換器
内蔵 - 消費電流
120mATyp - 出力周波数
1.2kHz - インターフェイス
RS-422 (Ethernet、USB2.0、D/A対応可)
- ※2 R.O.=定格出力(Rated Output)
- ※3 ZYX080A501は±1.0%R.O.
- ※4 ZYX080A501は±2.0%R.O.
外形図

わずかな力も検知したいときには-
業界最高峰の精度
高精度モデル
超高精度モデル
最小検出荷重0.005N。わずか0.5gの重量違いまで検知可能で、FPC挿入のような繊細作業も自動化します。

高精度マグネシウムモデル
マグネシウムのボディで、軽量、高剛性にもかかわらず、最小検出荷重0.03N。
定格荷重
300N, 6Nm

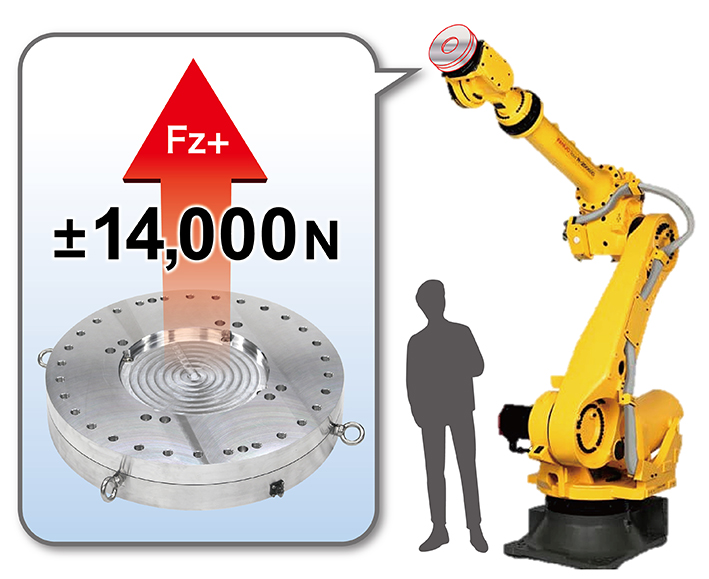
1t超の重量物の荷重を検知したいときには-
軽自動車ほどの重量物も計測
超大荷重モデル(高モーメント)
定格容量Fz:14,000N。1トンを超える重量物搬送の力検出や、重機のタイヤの取り付けアシストなどを可能にします。
1,000Nm
2,000Nm
3,000Nm
狭小なスペースで使用したいときには-
小型、狭小な製品に対応
小型センサ
小型のため、ロボットのハンドなど狭小な場所でも使用できます。
Φ9.6X9.0mm

定格荷重 40N, 0.4N・m
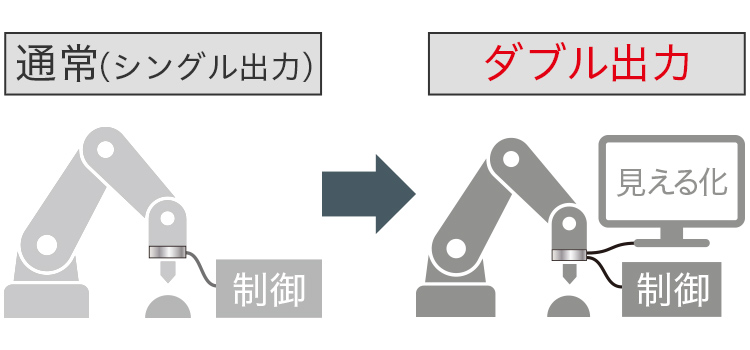
センサ1台で力制御とモニタリングをしたいときには-
ティーチングとトレーサビリティ性を向上
ダブル出力モデル
ロボットに取り付けた際、力制御用とPC等のモニタリング用で使用可能です。制御中の力データを可視化できます。

配線を外側に出したくないときには-
配線をスマートに格納
中空モデル

変換器
変換器を使用することで、各種通信形態にも対応できます。
イーサネット変換器
Ethernetに変換し、LANに接続
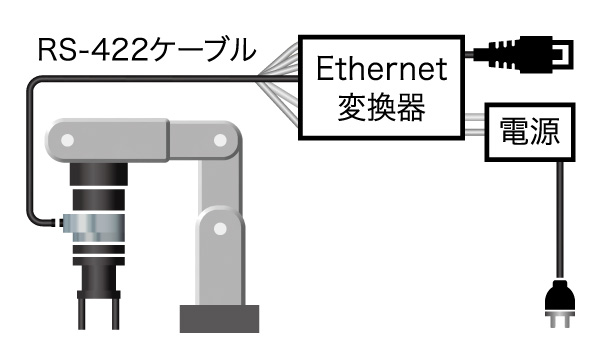
付属品:電源ケーブル
アナログ変換器
アナログに変換し、PLCなどに出力
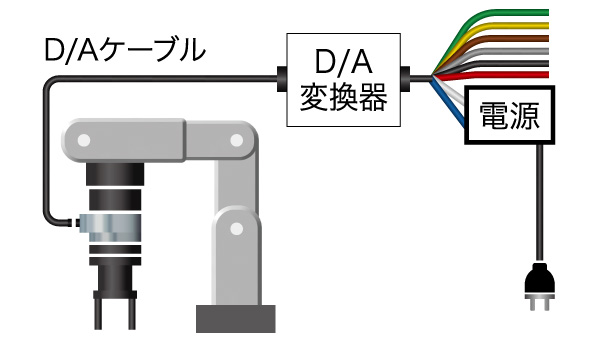
付属品:RS422ケーブル
アナログ出カケーブル
USB出カケーブル
USB2.0出力変換器
パソコンと接続できるようにUSBに出力
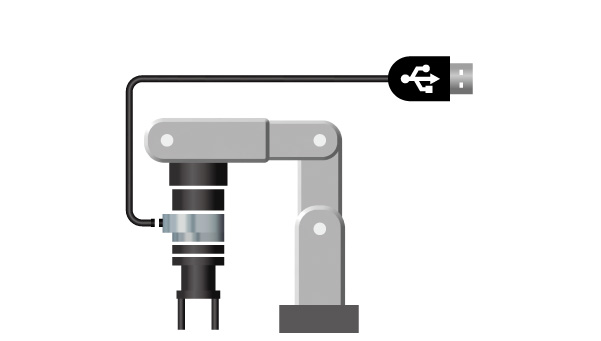
付属品:電源ケーブル
EtherCATユニット
EtherCATインターフェースにてパソコンとLAN接続
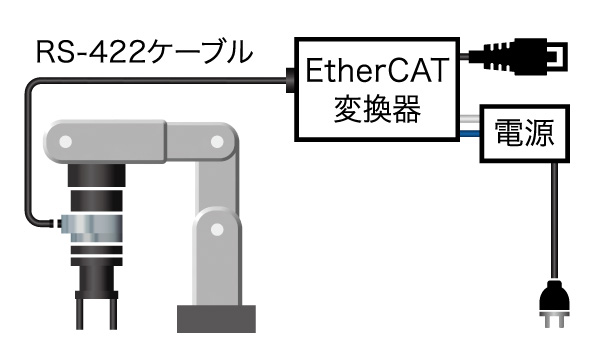
付属品:センサ接続ケーブル
サポート体制
- 対応荷重や分解能など、お客様の用途に最適なオーダー設計、カスタマイズした力覚センサの製造も承ります。
- センサ選定に向けたテストもお受けいたします。
- 一部のセンサは貸し出しいたします。
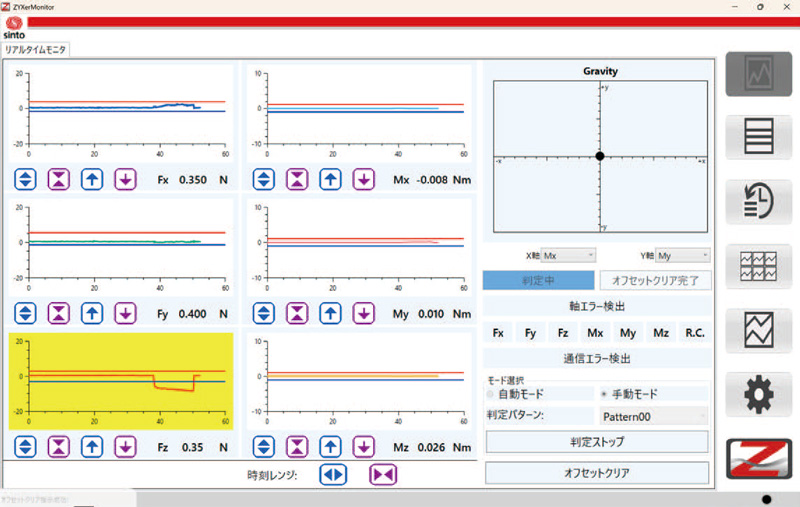
ZYXerMonitor
6軸力覚センサZYXerとZYXerMonitorをセットで導入いただくことで、
センサから高速で取得した6軸の力データをリアルタイムでモニタリングします。
また、力データからしきい値判定が可能です。
リアルタイム監視し、異常時に警告
導入メリット
- 自動化工程において、しきい値を外れた場合、異常発生と判断し、警告や設備の自動停止を実行。
不良品の後工程への流出を防止。 - 工程内で検知したデータを記録することで、不良発生時のトレーサビリティに対応。
- 記録された力データを分析し、工程改善に活用。
正常波形からしきい値を自動算出

特長
- 時間帯毎のしきい値を設定でき、生産変動にも対応。
- 最大16パターンを事前登録し、管理工数を削減。
力覚センサ ZYXer®採用のロボットメーカー様
ROBOT
力制御プログラムと連携可能なロボットメーカー様をご紹介します。
![]()
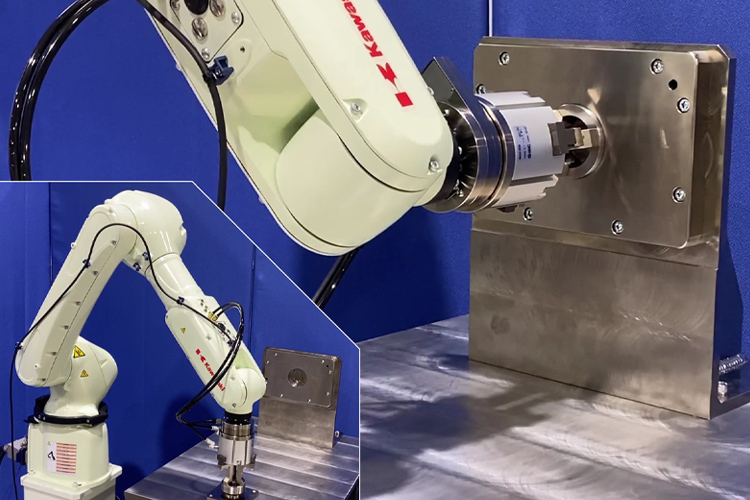
川崎重工業株式会社様:力覚センサ標準アプリケーション(嵌合システム)
ZYXer を搭載するポイント
- 精度が高く通信速度が高速なためビジョンセンサを使わずにH7嵌合が可能
- モーメントが高いため一般的な力覚センサに比べワークの高速搬送が可能
- 川崎重工業製ロボットへの接続が簡単 ※1
使用機器・条件
- ロボット型式
- RS007L ※2
- 力覚センサ型式
- ZYX080S102
- 嵌合公差
- H7/g6(すきまばめ)
- 許容ずれ量
(参考値) - X-Y方向1mm、Rx/Ry方向0.5°
※1 ZYXerは、川崎重工業株式会社様のK-AddOn製品として登録されています。
https://kawasakirobotics.com/jp/products-kaddon/zyxer/
※2 掲載写真は上記型式となりますが、その他カワサキロボットにも接続可能です。

![]()
三菱電機株式会社様
三菱電機ロボット+ZYXerを使用するメリット
三菱電機様の独自のAI技術である力覚学習機能※1 を使用可能で、力覚制御パラメータの自動調整や動作速度を最適化することができます。
※1:「MELFA Smart Plus 力覚センサ拡張機能」が必要です。
三菱電機様にてオプション設定されている力覚センサセット及びMELFA Smart Plusの詳細については、下記三菱電機様のHPをご参照願います。
https://www.mitsubishielectric.co.jp/fa/products/rbt/robot/pmerit/option/forcesensor.html
使用可能機種
- 三菱電機様
ロボット形名 - RV-2FR、RV-4FR、RV-7FR、RV-13FR、RV-20FR
- 6軸力覚センサ ZYXer
型式 - ZYX080A501、ZYX080A501Z、ZYX100A102、ZYX125A102
動作保証ファームウェアバージョン:R409
その他のロボットメーカー様
ファナック株式会社様
株式会社安川電機様
株式会社デンソーウェーブ様
株式会社不二越様
よくあるご質問
FAQ
-
Q. 非直線性とは何ですか?
- A.定格容量に対して、計測する荷重値の誤差です。実荷重と計測荷重の差が小さく検出することができるため、正確なロボットの制御ができます。
- A.定格容量に対して、計測する荷重値の誤差です。実荷重と計測荷重の差が小さく検出することができるため、正確なロボットの制御ができます。
-
Q. 他軸干渉性とは何ですか?
- A.1軸方向から荷重を与えた際に、他軸が検出する定格荷重に対する割合です。正確な軸方向・軸周りの力測定が可能になります。
- A.1軸方向から荷重を与えた際に、他軸が検出する定格荷重に対する割合です。正確な軸方向・軸周りの力測定が可能になります。
-
Q. 分解能とは何ですか?
- A.分解能=最小検出荷重/定格容量から求められます。
分解能が小さいほど緻密な作業でも対応可能となります。ZYXer®のラインアップはすべて1/4000となっております。
- A.分解能=最小検出荷重/定格容量から求められます。
-
Q. 通信方式(インターフェイス)は何がありますか?
- A.RS422が弊社の標準品となっておりますが他にはEthernet、EtherCAT、アナログ、USBがございます。
-
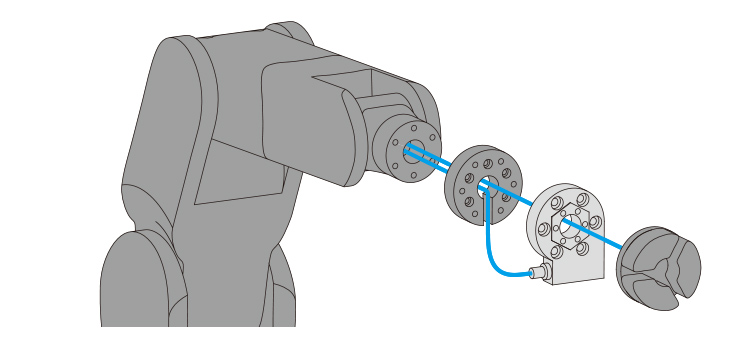
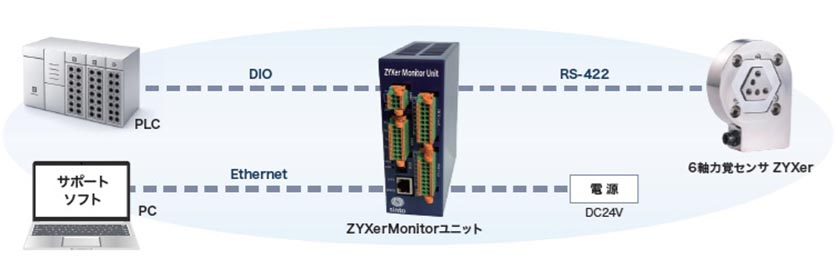
Q. ロボットとの配線図を教えてください
- A.下記の図をご覧ください。Ethernet、EtherCAT、アナログ、USBの通信方式の場合はセンサとは別に変換器が必要となります。
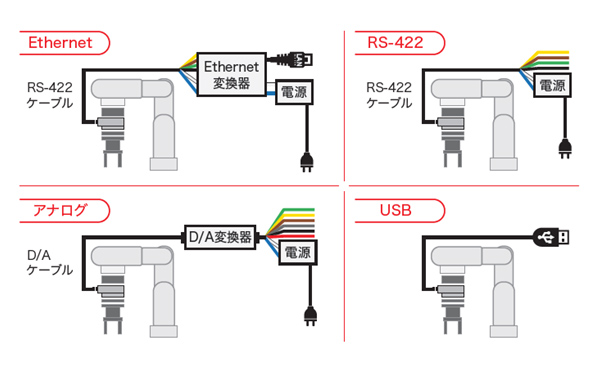
- A.下記の図をご覧ください。Ethernet、EtherCAT、アナログ、USBの通信方式の場合はセンサとは別に変換器が必要となります。
お知らせ
NEWS
- 2026.06.25お知らせ
- 2026.05.19展示会情報
- 2026.02.27お知らせ
- 2025.12.02展示会情報
- 2026.06.25お知らせ
- 2026.02.27お知らせ
- 2025.10.30お知らせ
- 2023.12.06商品情報
- 2023.10.06商品情報
- 2022.02.22商品情報
- 2026.06.25お知らせ
- 2026.05.19展示会情報
- 2025.12.02展示会情報
- 2025.06.20展示会情報
力覚センサ事業グループ
受付時間/月~金 9:00~12:00、13:00~17:00(祝祭日・弊社休日を除く)